










在目前的汽車電子系統中,全球導航衛星定位系統(GNSS)被歸類為資通訊娛樂(Infotainment)系統,因此在精準度、可靠度方面的要求,不如安全氣囊、引擎控制等系統嚴謹。但隨著駕駛自動化的程度越來越高,為了確保車輛行駛安全,汽車導航跟衛星定位功能勢必將面臨更嚴格的安全規範。
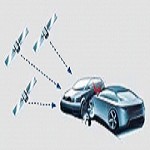
u-blox共同創辦人暨執行副總裁Daniel Ammann表示,隨著輔助駕駛系統不斷演進,自動化程度越來越高,GNSS在對駕駛輔助系統中所扮演的角色,將變得更為關鍵。舉例來說,當車輛在高速公路上行駛,準備要下交流道時,駕駛輔助系統必須要靠精準度更高的GNSS來引導車輛逐漸切到外側車道。在這個應用場景中,GNSS的誤差必須控制在1公尺內,否則駕駛輔助系統很難判斷目前車輛到底是在內側或外側車道,進而發出正確的控制命令。
事實上,雖然駕駛輔助系統或未來的全自駕系統會整合攝影機、雷達、光達等感測器,但這些感測手段只能取得車輛與其他物件之間的相對位置資訊,如果要取得車輛在地表的絕對位置,還是只能仰賴GNSS。因此,在需要用到車輛絕對位置資訊的應用場景,例如車輛要下交流道,或是能提供運輸服務的自駕車,都必須使用比目前更精準的GNSS。這也是目前u-blox正在積極研發的方向。
除了精準度更高之外,GNSS的可靠度也必須進一步升級,才能滿足全自駕系統的需求。在全自駕系統中,雖然系統可以從各種感測器取得所需的資料,但感測器本身提供的資料若一致性(Integrity)、可靠度有問題,自駕系統所做的判斷一定會受到影響。因此,在第四級或第五級自駕系統中,GNSS不但是必備功能,而且很可能要符合ISO 26262 ASIL-B等級以上的規範。
對GNSS技術開發商而言,要滿足未來自駕車的安全需求,是很大的技術挑戰。因為GNSS本質上是基於統計學所發展出來的技術,而且衛星定位的訊號很容易受到地形地貌的影響,例如在高樓林立的都會區,都市峽谷所帶來的多重路徑(Mutipath)效應,就會嚴重影響GNSS的定位結果。
有鑑於此,u-blox正在研發基於新演算法與支援多重協定、多頻段接收的次世代GNSS解決方案。根據u-blox目前的實地測試結果,新一代GNSS方案即便是在都會地區,誤差通常也不會超過1公尺。
Ammann透露,倘若研發工作進展順利,今年底前這款產品就會正式發表,以便趕上汽車製造商與Tier 1業者的產品開發時程。