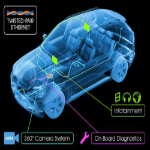









無人車系統與數據總線協定密不可分。無人車發展熱度持續延燒,但目前自駕系統軟體都還處於研發測試階段,工程師得把筆記型電腦帶到車上,才能控制自駕系統。在量產型自駕車款中,相關軟體必然要改由電子控制單元(ECU)來執行,且必須支援Terabyte等級的資料傳輸。能否達到這個目標,將是無人車能否大幅量產的關鍵因素。在資料傳輸服務(DDS)數據總線協定的快速整合下,從軟體測試邁向ECU的效率,將可望明顯提升,進一步促使無人車得以在2020年順利實現商用化。
Real-Time Innovations亞太區業務總監Howard Wang指出,當一輛無人車行駛24小時,大約會產生1 Terabyte的資料量。這些汽車中的大量資料,如同飛機中的黑盒子一樣重要。黑盒子須記下所有的飛行紀錄,以便當問題發生,才能夠據其進一步判斷問題的發生是肇因是機師,還是飛機本身,而在無人車的數據中,其則是分析感測環節、控制系統的重要依據資料。
Wang進一步表示,當系統還在開發階段的時候,可透過筆記型電腦來控制所有軟體系統,不過當自駕系統應用在量產車款時,必然要改由ECU來執行所有軟體,這會是很大的挑戰。而若能遵循DDS協定,將可大幅提升相關軟體的執行效率。
然而,因應目前有許多車廠正積極開發無人車技術,車廠除了遵循由RTI(Real-Time Innovations)主導的DDS協定,也有車廠選擇遵循由BMW主導的SOME/IP協定。不過,Wang認為,SOME/IP在表現、功能等面向上,是比較簡單的,因此與DDS有所落差。若依據目前的開發現況來看,當採用了DDS,就不會採用SOME/IP,而採用了SOME/IP,也就不會再用DDS,因此兩種協定未來很可能會是持續競爭的關係,還看不到整合的可能性。
此外,RTI將無人車的進化分成四個階段,第一階段指的是單一的控制功能,像是自動煞車系統,第二階段是由不同系統共同作業來進行控制,像是自動駕駛輔助系統(ADAS),不過在這個階段,駕駛人的雙手仍得放在方向盤上,第三個階段是駕駛人的雙手不再需要放在方向盤上,但駕駛人不能離開座位,也不能讓視線離開駕駛方向。第四階段,則為真正的無人車,完全不需要駕駛人,甚至可能連方向盤都不需要。
在第三階段,目前是車廠比較沒有在進行開發的,主要是考量到駕駛人的雙手若不放在方向盤上,其注意力將是很難掌握的,也就很容易造成危險事故的發生,因此大部分的車廠是選擇跳過這個階段,直接往第四階段進行開發。
Wang進一步表示,以RTI客戶的發展進程看來,第四階段完全不需駕駛人的無人車,將在3年內,也就是2020年就會在市面上問世,不過這樣的無人車,會是由如Uber這樣的租車公司來提供服務。原因在於,目前在租車服務中,80%的所得是由司機所獲得,而20%是歸租車公司所有,但事實上,租車公司很希望100%的所得皆是由租車公司所獲得,因此無人車的商業模式,將會是租車公司相當願意買單的,因其替租車公司省去了聘雇司機的大筆成本,且其採購的無人車數量會是相當大的。