










在製造業中,越來越多人使用自主機器人系統來幫助人類,自主機器人系統需要盡量即時地融合各種感測器資料,與人類使用五感的過程很相似,兩者都必須感覺、感知、計畫並採取行動。本文將討論感測器融合(Sensor Fusion)如何合併資料以產生最佳的機器人結果。自主機器人系統若想要成功,就必須能夠和周遭環境互動。因此自主機器人系統需要具備由環境感知和學習的能力。這主要須透過各種感測器才能完成。
自主機器人系統
為了獲取知識並回應周遭環境,自主機器人系統必須完成四大任務:
1.感覺-收集和接收資料。
2.感知-詮釋資料,了解自主機器人系統及周遭狀況。
3.計畫-制定行動方案。
4.採取行動-針對計畫採取行動,期間並進行調整。
人工智慧(AI)有助於監督這些流程。為了將AI成功應用在許多產業中,在推論學習,也就是執行受訓機器學習(ML)演算法的期間會進行感測器數據融合,並且必須幾乎即時進行。這表示機器學習和深度學習(DL)模型必須位於邊緣,進而將推論部署到嵌入式系統中。
感測器融合
用於適性化自我學習的人工智慧機器人系統的訊號鏈需要即時融合不同的感測器資料。自主機器人系統在感測和感知的交會點會進行感測器融合。就像人類的五官一樣,自主機器人系統的感測器會收集外界的資料。收集到的資料必須加以解釋並轉化為知識。這意謂著必須將各種感測器的資料加以整合,進行後續處理,以利系統能深入理解。這個階段稱為感測器融合。就像人類的感官一樣,感測器融合也會組合各種類型的數據(圖1)。
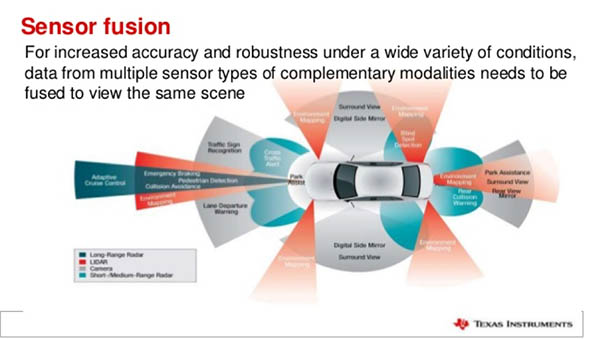
例如食用甜食的人類體驗將視覺、味覺和嗅覺等多種感官結合在一起,以協調出愉悅的體驗。這些人類的感官攜手努力,減少了消費中的不確定性,使人們能從資料中取得更精闢的見解。人類在飢餓的時候會從冰箱中拿出甜點,它可能具備能為大腦輸入資訊的視覺外觀,儘管它曾經可能是很美味的甜點,但視覺外觀顯示現在可能也會是如此。氣味可能也適用相同的道理,原因可能是因為視覺和嗅覺的感官對於在收集的資訊回應良好,所以人類會感受到這道甜點的吸引力。在任何情況下,各種感官都會攜手合作,協助完成手邊的任務並做出決策,提供反饋。
資料關聯性
資料具備關聯性時,首先必須確定一件事。回應上述甜點的案例,當所有的資料都彼此相關;也就是說,只討論甜點本身的資料。相關資料是與分析標的有關的資料。假設如果拿甜點時火災警報器響了,會發生甚麼事?火災警報器是新的資料。它與甜點本身以及是否應該吃掉無關。
但是這項最新的資料是必要資訊,需要優先採取滅火行動。同樣地,無關資料是指在目前操作中,自主機器人系統取得的資料與歸納分析重點無關,但可能很重要。它與目前流程並無直接關係,但是後續步驟(計畫和行動)必須納入考量。因此感測器融合的目標是由資料中取得更深入的見解,其中有幾種協助感測器融合深入了解自主機器人系統的運作方式。
提升資料品質
感測器融合科技使系統能透過更高的資料品質進行運作。這是什麼意思?資料本身未改變。例如量測時發生的電子雜訊,也就是各種因素導致感測資料產生變異性。想要降低雜訊,可以採用更多的感測器,然後執行數學或軟體過濾功能,以取得更具體的資料集。可使用平均數函數來計算,並利用不同的感測器組合,比較結果後擇優使用,以減少不確定性。
超音波感測解決方案
廠商如德州儀器(TI)是感測器融合產品業者,感測器融合應用的一項關鍵技術就是超音波感測。超音波感測器可偵測的音波,比人類聽力的頻率上限(大約20kHz)還高。超音波感測器通常用於偵測障礙物反射的回波以偵測物體。自主機器人系統通常採用超音波感測器以避免碰撞。超音波感測可與毫米波(mmWave)、攝影機和光學雷達(LiDAR)等其他感測器結合使用。
超音波感測的特點是偵測距離短、偵測角度寬、解析度高,在惡劣氣候下的表現也相當良好。對於不需要高速機器人的家庭和工廠而言,超音波感測是低成本及低速的雷達替代品。在避開障礙物方面,超音波感測比光學飛時測距(ToF)感測更可靠,因為超音波感測不受障礙物反射的可用光量所影響。此外,由於超音波感測使用音波而不是光來偵測物體,因此它能感測到玻璃或其他透明表面。
自主機器人系統使用超音波避障系統的元件可能包括超音波訊號處理器和換能器驅動器,例如PGA460/PGA460-Q1超音波處理器及驅動器就是高度整合的系統單晶片超音波換能器驅動器,以及附有高階數位訊號處理器核心的訊號調節器(圖2)。它能驅動變壓器,處理回波送回的電子訊號,並即時計算每個重要回波的飛時測距資料。這項裝置附有互補的低側驅動器組,可以在基於變壓器的拓撲中使用升壓變壓器驅動換能器,也可以在直接驅動拓撲中使用外部高側FET驅動換能器。PGA460/PGA460-Q1可接收和調節反射的回波訊號,以便進行可靠的物體偵測。這項功能可透過使用由低雜訊放大器組成的類比前端(AFE)來達成,然後由可程式化的時變系統增益級饋入類比數位轉換器。接著再使用時變門檻在數位訊號處理器核心中處理數位訊號,以偵測近場和遠場物體。

其他設計也可能受惠於TUSS4470直接驅動超音波感測器晶片,是一種工業超音波應用專用的高度整合變壓器驅動類比前端(圖3)。換能器驅動級是可配置在直接驅動模式下驅動換能器的內部H橋,以便在換能器上取得最大電壓。內部H橋也可配置為外部FET專用的前級驅動器,進而為較大的感測器提供更高的電流和電壓驅動。
提升可靠度
感測器融合還可以提升可靠度。根據其定義,感測器融合表示感測不仰賴單一故障點。使用兩個以上的感測器並融合其資料時,如果其中一個感測器發生故障,資料仍可接收無誤。這無法預防重大故障導致系統無法正常運作,例如電流過載、外力創傷或損壞。但確實在系統整體仍需要故障防護的同時,減輕了元件負擔,並降低了元件故障的可能性。
感測器融合還可透過投票提供更可靠的資訊。這表示如果數個感測器在測量同一物體,意即它們都正在提供資料,則系統可能會選擇並使用最接近的感測器所提供的資料,因為它認為該資料代表與最接近實際狀況的感測器。
估算彌補量測數據
感測器融合能協助達成的另一項目標是,當物體位於暫時無法測量的環境中,無法予以直接測量時,它能協助提供相當有用的估算值。通常在這些應用中,可透過卡爾曼濾波器將感測器融合結合實際世界的知識。卡爾曼濾波器是由Rudolf Emil Kálmán發明的數學運算法。它通常用於導航,包括全球定位系統(GPS)。卡爾曼濾波器可進行預測,然後取得更新。它使用預測值和測量值的加權平均值,同時加以自我調整,將線性差異縮到較小。就數學上而言,這個方法可提供相當優異的估計值,因為加權平均法使估計值變得平滑,同時以細微增量調整方向。
擴大涵蓋範圍
感測器融合也可以用來擴大涵蓋範圍。這個概念很簡單,例如想在野外尋找掉落的物體,黑暗中可使用手電筒,但是更好的辦法是使用大量的手電筒或使用泛光燈。無論是哪種情形,都是用更多的光線照亮周遭環境,眾人就能輕鬆找到物體。融合感測器更多,涵蓋範圍就更大。
感測融合賦予機器人感知
自主機器人系統需要盡量即時地融合各種感測器資料。感測器融合賦予自主機器人系統感測、感知、計畫和行動的能力,揭示了自主機器人系統的未來。透過感測器融合取得更深入地資料解析,自主機器人系統就能實現目標。因此有一天,這些自主機器人系統就能像人類一樣,深入感知周遭工作環境,並有效予以回應。
(本文作者任職於貿澤電子)