









台灣已具備無人車研發能力。在Google推出無人車並進行道路測試後,台灣車輛研究測試中心近期亦研發出具備無人車雛形的汽車自動駕駛技術,並在成本與關鍵技術方面取得競爭優勢,可望於未來5年追趕上國際大廠腳步,實現首款國產無人車。
 |
| 車輛研究測試中心副總經理廖慶秋表示,未來國內在無人車開發上,無論技術或成本都將具有一定優勢。 |
車輛研究測試中心副總經理廖慶秋表示,在無人車的開發上,多數技術問題已被解決,而目前主要的兩項挑戰,分別在於感測器成本過高,以及決策系統的設計如何克服複雜環境干擾。若可打通上述環節,以台灣產業界的實力,2020年將可望實現由A點到B點的汽車無人自動駕駛。
廖慶秋進一步分析,無人車系統包含兩個重要部分,分別為雷達感測器與影像感測器。其中,雖然影像感測器的成本已經降低許多,但雷達感測器的價格仍然居高不下;另外,全球衛星定位系統(GPS)元件也是墊高物料成本的因素之一,未來目標是能將手機的GPS導航元件直接使用於汽車上。
在技術部分,廖慶秋指出無人車的心臟在於決策系統,主導汽車行進、停止或轉彎等動作,當面對瞬息萬變的天候、路況等因素,如何將車上多個系統融合在一起,並使其具備適當的決策判斷邏輯,將是考驗無人車能否成功的關鍵。以現有技術而言,僅能做到短距離內自動行駛至某個位置停車,但若是要做到長距離的A點到B點自動駕駛,受限於周遭環境太過複雜,若天候不佳影響GPS接收訊號,便會使定位與導航能力大打折扣。
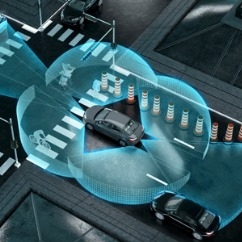
有鑑於此,台灣車輛研究測試中心著手進行關鍵技術的研發,成功開發出利用毫米波雷達偵測前方障礙物,並將障礙物資料回傳至影像裝置進行判別,即使是在複雜場景的壅塞市區道路上,也能過濾雜訊與不必要的靜態障礙物如電線杆、告示牌等,對於天候不佳時影像失效的問題提供系統失效防護,並加強辨識能力。此技術已用於該單位研發的自動緊急煞車系統(Autonomous Emergency Braking, AEB)中,並可望於2019年立法成為巴士、砂石車等大型車輛標配。
此外,車輛研究測試中心也同步發表倒車防撞系統(Parking Collision Avoidance System, PCAS)結合「超音波與影像之感知融合技術」與「電子駐煞車」,可以估測車輛與障礙物的碰撞時間,當預估到有碰撞危機時便主動煞車。另外還有自動駕駛輔助系統(Autonomous Driving Assistant System, ADAS),此系統能透過智慧型手機下達指令,讓汽車自動抵達設定的停車場並停入指定停車格,待車主再次下達命令時,自動駛回車主面前。
針對Google已開發出無人車並進入道路測試,廖慶秋強調,未來在關鍵技術如運算邏輯方面會與Google有所不同,而比較重點就在於運轉的速度與元件成本。目前車輛研究測試中心所採用的無人車決策技術,是和美國卡內基美隆大學(Carnegie Mellon University)合作開發,為美國無人車研發的始祖,車輛中心取得其技術並進一步簡化決策程序以及降低成本,未來國內自製無人車無論在成本或運算能力方面,與國外汽車大廠或Google相比亦毫不遜色。
在無人車開發時程方面,廖慶秋預估,快速公車運輸(Bus Rapid Transit, BRT)之類固定路線的大眾運輸工具可望率先導入,這類應用相對比較不會受環境干擾,可能約2〜3年時間便能克服;而消費性市場因容易衍生法律問題,汽車製造商仍會觀望一段時間。至於要真正達到由A點到B點的自動駕駛應用,因須克服的干擾問題較多,推測大概5〜6年左右的時間能有方案問世。