













日前發生Uber自動駕駛SUV撞死行人的意外事故,使得自駕車安全性再度引發討論。對此,工研院資通所車載資通訊與控制系統組組長蔣村杰表示,目前自駕車所搭載的感測設備包含傳統雷達、視覺影像系統,以及光達(LiDAR);爾後若是能再透過V2X車聯網技術提升自動駕駛,將能有效避免車禍發生。
據悉,Uber、特斯拉(Tesla),以及Google所採用的自動駕駛系統,主要是基於視覺影像系統和光達。而從Uber自駕車發生事故時的影片可看出,在當晚車輛所行駛的道路上,有一部分道路是被陰影所覆蓋,推着自行車的行人從道路左邊開始穿越道路,而他橫穿道路的路線,恰好處在陰影區域內;Uber自駕車上搭載的光達和攝影鏡頭起初無法在陰影區內偵測到行人,當行人突然出現後才發現其存在,但已來不及做出反應,最終造成意外。
由此可見,目前的光達或是影像系統,於偵測上仍有所不足。蔣村杰認為,要改善此一情況,除了繼續配備原有的感測設備外,還須加上V2X聯網設備,才能進一步提升自駕車的安全性。
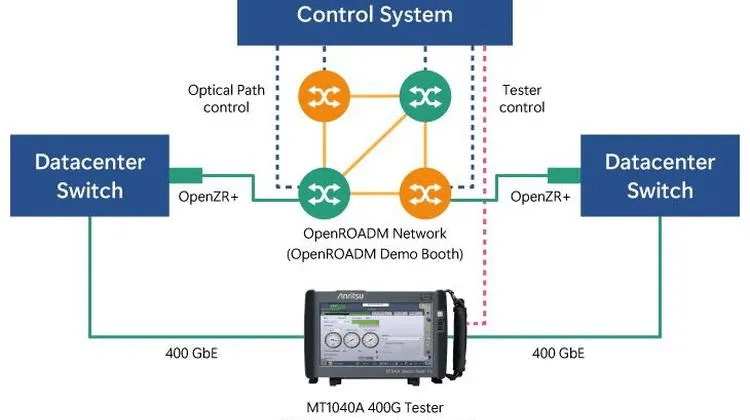
蔣村杰指出,V2X車聯網技術,正是為強化安全性任務而設計。以短距無線通訊技術(DSRC)為例,該技術以每秒10次的頻率交換其動態訊息,這些訊息包括位置、速度、加速度、行進方向,以及其他交通相關訊息。換言之,V2X的無線通訊能力,能將司機或自動駕駛車輛的感知能力,從視覺所及的範圍,提升到視覺所不及的幾公里之外。
也因此,若是未來自駕車結合V2X技術,即便遇到視野不清晰或是視線被遮擋,司機或自動駕駛車輛都能夠即時了解周圍所有的交通情況,如此一來便能防止如Uber此類的意外發生。
另一方面,在Uber事故發生之後,如何完善自駕車法規,釐清事故責任,也成各國政府當務之急。像是德國便規範若事故發生是在駕駛員駕駛車輛時,駕駛員必須承擔事故責任;若事故發生是在自動駕駛模式時,責任則歸屬於車廠。
蔣村杰說,建立適用於自動駕駛技術的交通法律、技術規範及基礎設施,針對該類型載具或其他自主運輸系統,並適當調整既有交通法律、統一環境道路測試與既術標準,才可確保跨境互通性,以及投資建立自動化駕駛所需之電腦及通訊基礎設施。





