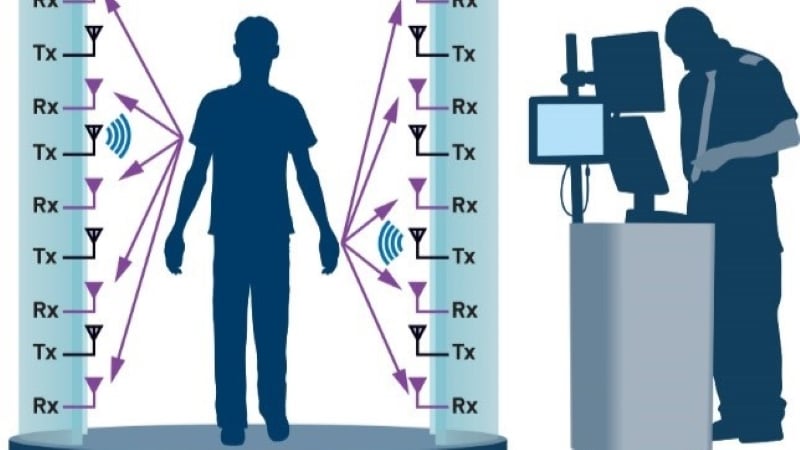











毫米波掃瞄儀優於傳統金屬探測器的原因,在於其能辨識與定位出包括金屬與非金屬材質的威脅性物品。基於毫米波成像硬體元件的工作原理,晶片組有助於運用邊緣處理能力來管理龐大的資料負載,協助客戶開發人行安檢掃瞄系統。
系統設定與運作
(承前文)發送器與混頻器特別設計用來在大型陣列高效率運作。此方面的設計特別強調降低布線開銷。發送器與混頻器的RFIN與LO輸入埠可以在–20 dBm的功率下運作。由於用戶希望從一般LO訊源驅動這些輸入,此種低輸入功率靈敏度允許配置大量的被動分路之後才需要放大電路。例如,如果採用淨功率損耗1 dB的Wilkinson功率分配器,那麼產品如ADF4368的9 dBm輸出功率即可允許配置七次被動分路,並能驅動128個元件(512通道)。
用來驅動發送器與混頻器晶片內建序列器的步進與重置針腳,亦設計成能平行驅動,藉此盡量減少處理器或FPGA必須提供的GPIO數量。藉由在序列器中提供足夠的深度與複雜度,即可僅用一組步進與重置脈驅動最多16個發送器元件。在運作之前,發送器與混頻器序列器必須進行程式化。雖然可以運用SPI指令來存取兩個元件的所有功能,但相關的延遲可能導致整體掃瞄時間變得長到無法接受。
接著考慮如何針對通道式掃瞄建構一個64通道系統(64傳送器、64個接受器),以單一頻率運行所有傳輸通道,然後逐步提高頻率並重複掃瞄程序。圖6說明如何對發送器元件內的狀態機進行程式化,來執行此種掃瞄。這個架構的其中一項關鍵目標,是從一條共用的控制電路對執行不同作業的多個元件進行排程。
注意在圖6中每個IC有65種狀態,大多數的IC設定成在大多數時間處在休眠模式(SLP)。例如IC 1在1、2、3、4號通道進行循序傳輸時,只有在前4個狀態下才會完全啟動。在此4個狀態中,所有其他IC都處在SLP或就緒(RDY)模式。同樣,IC 2只在當所有其他IC處在SLP休眠或RDY就緒模式時,並在狀態5至狀態8的時間才會完全啟動。以此種方式設定16個狀態機,讓其開啟週期加上偏移量相互錯開,就能以平行脈衝驅動16個元件的步進與復位線。

RDY就緒模式是一種中間狀態,用來最佳化切換時間與節省電力。由於大多數發送器在大部分時間處在非啟動狀態,因此SLP模式就成為壓低功耗的關鍵。但以系統角度來看,從SLP模式切換至傳輸模式所需的時間(50 ns)已過長,在掃瞄時可能導致延遲。RYD模式是一種中間狀態,在IC準備傳輸時可以切入此種模式。注意到在圖7中,在狀態4裡,IC 1的Channel 4在進行傳輸,IC 2切至RDY模式準備進行傳輸。在發送器從狀態4轉換至狀態5時,IC 1會從傳輸模式轉換至RDY就緒模式,而IC 2則會從RDY模式轉換至傳輸模式。如此的轉換會耗費10ns。後續的晶片通道切換(亦即IC 2從Channel 1切換至Channel 2、Channel 3、Channel 4),切換時間要花費2 ns。對一個有1,024個元素的矩陣,以0.1GHz的步進單位從10 GHz切換至40 GHz,則整個掃瞄程序會在不到20 ms內完成。這裡假設PLL鎖定時間為50 µs。如果兩個PLL以輪流交替(Ping-pong)模式運作,藉以加快達到頻率穩定狀態,則掃瞄時間可壓低到5毫秒以下。
如上所述,每個ADC通道可存取三個正交DDC通道。表示其能同時解調三個頻率,而前提條件是所有三個頻率都處在ADC類比輸入頻寬(125 MHz)的輸出頻率範圍內。為了在傳輸側實現這種模式,必須使用三個傳輸PLL而非原本的一個。三個傳輸頻率必須引導至不同的實體傳輸IC(發送器內的倍頻器無法傳送多頻調訊號)。在掃瞄時採用的三個頻率必須始終不同,但也必須保持相互靠近。例如,如果ADAR2001元件內的某一個通道以10 GHz進行傳輸,其他兩個元件必須以10.025 GHz與10.050 GHz進行傳輸,才能支援50 MHz、75 MHz、以及100 MHz的中頻輸出。此種機制需要在傳輸路徑上運用更多硬體與切換基礎設施,但好處是能將整體掃瞄時間減少三倍。
邊緣運算優化毫米波成像
四通道發送器、四通道接收器、十六通道類比數位轉換器、以及PLL/VCO的晶片組提供更高的整合度與功能性,為實作新一代毫米波人行安檢掃瞄儀提供所需的必要元件。整合的狀態機以及晶片內的數位降頻轉換機制能大幅分擔傳統集中化處理模式的工作負荷,並轉型成智慧邊緣設備。智慧設備在掃瞄時,中央處理器比較不必費心去處理系統的控制作業,而其接收到的資料也已經完成解調與疏化抽樣。儘管上述晶片組是針對毫米波安全成像應用所設計,但發送器與接收器的寬廣頻率範圍以及十六通道ADC的整合度,使得此晶片組亦適合用於其他要求高通道密度與快速切換的應用。
(本文作者為ADI應用工程經理)
毫米波掃瞄儀更智慧 邊緣運算助力影像管理(2)