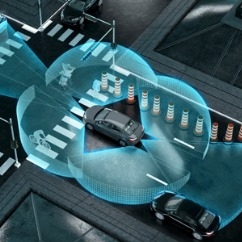











駕駛人對汽車所處環境掌握度將大幅提升。為解決現今汽車2D影像系統的視角限制問題,業界提出藉由整合多個攝影機建構出3D模型影像的方案,提供駕駛人更完整的汽車四周即時影像訊息,增進汽車影像應用效能。
 |
| 富士通市場部資深經理周浩洋表示,如何妥善的處理資訊,並滿足駕駛對於行車安全和舒適度的需求,將是促進智慧汽車第二階段發展的重要因素。 |
富士通(Fujitsu)市場部資深經理周浩洋表示,以往的汽車影像系統將攝影機影像呈現在2D平面上,僅能提供由上方觀看的俯視視角;然而,若視角可根據使用者的需求任意轉動,將能讓駕駛對汽車周圍狀況及車體所處位置一目了然,如同從前面、上方看到的影像一樣,斜後方的死角也無所遁形。
針對這項需求,富士通整合了高靈敏度影像感測器、複雜的智慧演算法以及高效能控制器,開發出360° 3D全景環視系統—OMNIVIEW;其採用獨特的影像處理技術,將車輛前後左右四個攝影鏡頭所拍攝的影像進行合成,並在螢幕上顯示出3D模型影像,提供汽車駕駛自由改變汽車周圍的影像視角。
該系統處理速度僅33毫秒(ms),因此即使汽車在高速行駛中,影像訊號也能即時於駕駛座的監視器顯示,透過如鏡面般的影像,讓使用者即時確認車輛周圍狀況。此系統的另一項特色是高通用性,可適用於類比或數位攝影鏡頭;同時,富士通在車載人機互動部分,也提供車用虛擬液晶儀表方案和車用控制匯流排方案。
周浩洋指出,富士通OMNIVIEW 3D全景環視系統和全新人機互動介面正在中國大陸、台灣和南亞地區進行全面性的市場推廣,特別是在中國大陸和台灣都有許多成功案例,有多款採用全新系統的汽車將會在2015年亮相。
一般而言,智慧汽車由駕駛輔助應用到完全的自動駕駛共分為四個階段,目前第一階段的駕駛輔助系統已經完成基本架構,許多新車也已搭載相關系統;而第二階段的半自動駕駛系統,可讓汽車自行偵測危險後做出反應,相關技術包括有自動緊急煞車系統(AEB)、緊急車道變換輔助系統(ELA)等,這部分將是業界下一波布局的重點。
對此周浩洋也透露,富士通現階段除致力於打造半自動駕駛車輛外,也已著手開發最新一代整合鐳射感測器和高畫質攝影鏡頭的全景多視角輔助駕駛系統,該方案可偵測汽車周遭的問題,並重建周邊環境的3D影像。富士通以該方案做為基礎,預期不久的將來即能實現完全自動駕駛的智慧汽車。