










根據ResearchAndMarkets指出,光學雷達(LiDAR)市場2019年產值達9.81億美元,到2025年預計達2,766萬美元,2020到2025年複合年增長率預計為20.7%。光電協進會認為,提升LiDAR市場增長的主要因素包括無人機中LiDAR系統的採用不斷增加、工程和建築中地理資訊系統(GIS)LiDAR的使用,以及4D LiDAR的出現和法規的放鬆,導致不同應用大規模使用商用無人機有關。

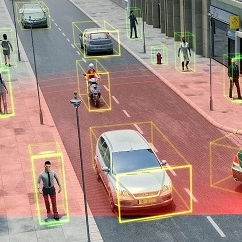
隨著LiDAR逐漸成為ADAS和自動駕駛汽車(AV)的關鍵感測器,在車輛整合的樣式方面與功能之間取得平衡變得越來越重要。除了總體製造性、可靠性、價格和耐用性方面的考慮外,位置也很重要。從這個意義上分析,LiDAR只是沿襲了諸如雷達、照相機和超聲波之類的傳統感測器的腳步。從整合的角度來看,將LiDAR與其他感測器區分開的主要原因有:
1.要求低損耗和清潔光學表面(每個LiDAR直徑通常為25~50mm)
2.更高的功耗,通常在15~30W之間
3.光學雷達的熱管理(大部分輸入功率轉換為熱量),需要保持其「冷卻」。否則如雷射器、檢測器和掃描儀之類的元件會發熱,並導致性能和可靠性問題
4.尺寸和體積具優勢。因為當今大多數成熟的激光雷達感測器都使用機械或光機械掃描儀,這些掃描儀體積相對較大,很難從美學上整合到汽車中,因此固態LiDAR(無論是閃存還是使用固態掃描),在這方面都具有明顯的優勢,但是許多技術才剛剛成熟,還沒有準備好整合到用於市場的第一套ADAS和自動駕駛汽車中。
從2000年代的DARPA大挑戰賽到用於共享汽車和運動自動化的影音開發早期,樣式和空氣動力學設計都不受重視,導致原型車看起來很奇怪,在部分情況下甚至令人恐懼。但是隨著ADAS和AV的成熟,Waymo等公司越來越關注感測器模組與自動駕駛汽車的整合。其背後的原因之一,是認識到有必要為乘客提供視覺和情感上的親密體驗,並建立對這種新搭乘方式的信心。
近日在比利時特斯拉Model 3開始測試光學雷達系統,Model 3車頂設備採用類似於Velodyne Puck 32MR LiDar。製造商指出,此設備非常適合工業車輛、移動機器人和相對低速移動的無人機。光電協進會認為,無論最終它是否得到了特斯拉的認可,這也意味著馬斯克(Elon Musk)改變了對激光雷達的態度,並繼續朝著這個方向前進。