借力多核MCU/編碼器 PMSM助工業機器人精準位移
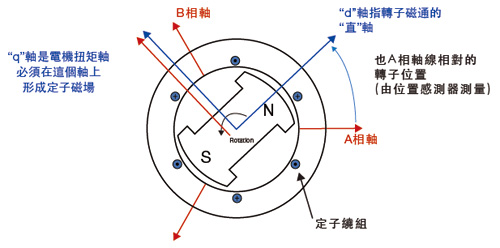
永磁同步馬達(PMSM)通常用於高效能、低功耗的馬達驅動。高效能馬達控制的特徵為可在整個速度範圍內平穩旋轉,零速度時有完全的扭矩(Torque)控制,且能達到快速加速和減速。為了達到上述要求,PMSM採用向量控制技術,該技術通常還被稱為磁場定向控制(FOC)技術。向量控制演算法的基本思路是將一個定子電流分解為磁場生成的分量和扭矩生成的分量,分解後,這兩個分量能單獨進行控制;而馬達控制器(亦即向量控制控制器)的結構幾乎與一個他勵直流馬達(DC...
2014 年 02 月 22 日